 岡山理科大学 研究・社会連携部
岡山理科大学 研究・社会連携部 
工学部 機械システム工学科
- 教授
林 良 太
- 研究分野
制御工学、機械力学、リハビリ工学、ロボット工学
- キーワード
回転リンク系、移動ロボット、リハビリテーション、操縦支援
- 研 究
テーマ -
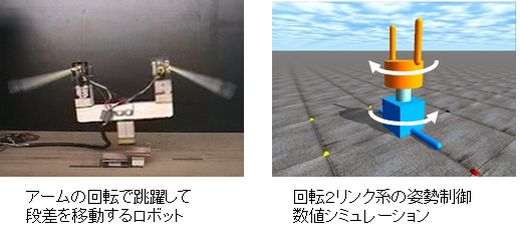
- 回転リンク系の姿勢制御に関する研究
- アームの回転運動を利用して移動するロボット
- 水陸両用ビークルの操縦支援システム
- 表面筋電位の発生を促すリハビリ支援システム など
研究活動の概要


回転リンク機構に見られる力学現象を理解して応用すると、これまでの日常ではみられなかったような新しい技能を機械に発現させることが可能になります。本研究室では、回転リンクを巧く制御することによってロボットの移動を実現したり、ロボットアームの姿勢を制御したりする方法についての研究をしています。また、機械を操るときの人間と機械との関係を考察し、人間が機械の操縦技能を効率良く獲得できるような支援システムの研究も行っています。
- 希望する
連携内容 -
- コンピュータプログラムとメカトロニクス技術を利用したリハビリ支援システムの開発 など