 岡山理科大学 研究・社会連携部
岡山理科大学 研究・社会連携部 
工学部 電気電子システム学科
- 教授
- クルモフ バレリー
- 研究分野
制御工学
- キーワード
適応制御、未知外乱推定・除去、移動ロボット
- 研 究
テーマ -
- 非線形制御系の設計
- 適応制御理論とその応用
- 移動ロボット(UGV、UAV)ナビゲーション
研究活動の概要

適応同定機能や推論機能などのインテリジェント機能を有する制御システムについて、設計法およびその数理的解析の研究を行っています。現在、産業界には、数多くのサーボコントローラが使用されており、生産の効率化、高精度化のためにサーボ技術の改良が強く望まれています。摩擦やバックラッシュのようなものは非線形であり、かつ、サーボ動作時に変動するため、従来のPID等の制御手法では有効に補償できない。そこで、外乱ロバストな制御手法、すなわち、外乱の元となる非線形要素の特性を考慮して、変動する外乱を推定して自動補償を行う方法について研究を行っています。
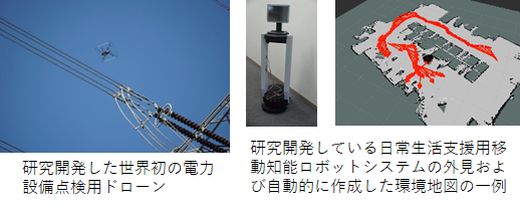
さらに、知能機能を持つロボットの開発を行い、特に、自動的経路生成、遠隔操作、環境認識などの電力設備自動点検等の飛行ロボットの実現をし、実用化をしています。
- 希望する
連携内容 -
- インテリジェント制御系の設計
- 移動ロボット
- 飛行ロボット(ドローン)の研究開発