 岡山理科大学 研究・社会連携部
岡山理科大学 研究・社会連携部 
情報理工学部 情報理工学科
- 教授
藤 本 真 作
- 研究分野
ロボティクス、計測・制御工学、システム同定
- キーワード
電動車いす、アクティブ補装具、受動歩行機
- 研 究
テーマ -
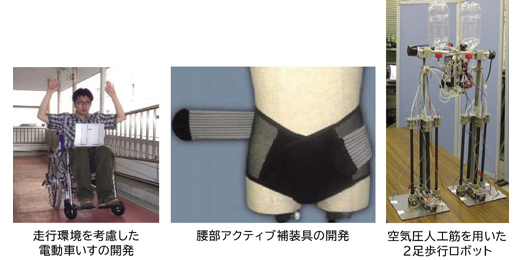
- 電動車いすの高機能化
- 腰部アクティブ補装具の開発
- 空気圧人工筋を用いた2足歩行ロボットによる3D準受動歩行
研究活動の概要

従来のロボティクス技術を福祉機器(福祉用具)の開発分野に応用することや、そのシステムの構築法について研究を行っている。以下にその主な研究を3つ紹介する。(1)電動車いすの研究は車いす特性(使用者の質量や摩擦など)と走行環境(路面の傾き)の両方を推定し、それらの情報に基づいた車いすの制御系設計法の確立を目指している。(2)腰痛は高齢者だけでなく若年層も抱える疾患のひとつである。そこで、腰痛を改善するために、締め付け機構に空気圧駆動柔軟アクチュエータを装備した腰部アクティブ補装具の開発を目指している。(3)2足歩行のメカニズムを解明するため、3次元動歩行機の構築を目指している。
- 希望する
連携内容 -
- 福祉用具の開発
- 腰部・膝などアクティブ補装具の開発
- 受動歩行を利用したシステムの開発