 Research Support Office, Okayama University of Science
Research Support Office, Okayama University of Science 
- Professor
- Tetsuya AKAGI
- Research Field
Mechatronics, Pneumatic control device, Mechanical control
- Keyword(s)
Soft actuator, Wearable control system, Embedded controller
- Research theme
-
- Development of Low-cost Flexible Pneumatic Actuator and Its Application for Home-based Rehabilitation Devices
- Development of Low-cost Wearable Fluid Control Valve and Its Application
- Development of Various Flexible Robots Using Flexible Pneumatic Actuators


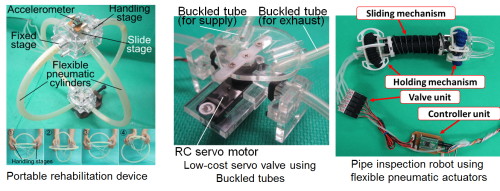
By taking advantage of pneumatic actuators that have features of higher force / mass ratio, lightweight and flexibility based on compressibility, we have developed low-cost wearable actuators and low-cost home-based rehabilitation devices that can be disposable after using it. Specifically, we developed a flexible pneumatic cylinder that can be used even if the cylinder bends. A spherical actuator that consists of two flexible pneumatic cylinders have been also developed as an application for portable rehabilitation device. We have also developed a low-cost wearable servo valve using buckled tubes, an artificial muscle with built-in displacement sensor and a pipe inspection robot using extension type flexible pneumatic actuators. In addition, aiming at globalization for students, all graduate students in our laboratory have presentation in international conferences.
- Desired cooperation
-
- Development of wearable pneumatic controlled devices using embedded controllers and its application
- Implementation of low-cost, small-sized and light-weight pneumatic control valves
- Development and application for flexible actuator and flexible sensors