 Research Support Office, Okayama University of Science
Research Support Office, Okayama University of Science 
- Associate professor
- Hidehisa AKIYAMA
- Research Field
Multiagent Systems, Mobile Robot Systems
- Keyword(s)
Soccer, Computer Simulation, Map Building
- Research theme
-
- Development of decisin making algorithm using RoboCup Soccer Simulation
- Machine Leaning in multiagent adversarial environment
- Data collection, analysys and visualizaiton using mobile robots
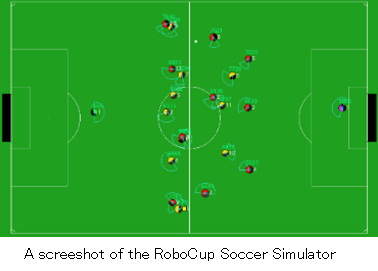
A multiagent system is a research field that tackles problems that are difficult to solve by one agent by running a large number of agents. My research focus is teamwork behavior in the simulated soccer domain. We are studying behavior learning algorithms for soccer tasks using the RoboCup Soccer Simulator. Achieving better methods of environmental recognition and decision making through multiagent adversarial games such as soccer is expected to be applied to real human society. As applications in the real world, we are also conducting research such as collecting and analyzing information that humans pay attention to when deciding actions and building environmental maps using multiple mobile robots.
- Desired cooperation
-
- Sports data analysis
- Human action support
- Monitoring system