-
Faculty of Information Science and Engineering, Department of Information Science and Engineering
- Associate professor
- Ryoichi KASE
- Research Field
Representation Theory, Tilting Theory
- Keyword(s)
Representation Theory, Tilting modules, Tilting mutation
- Research theme
-
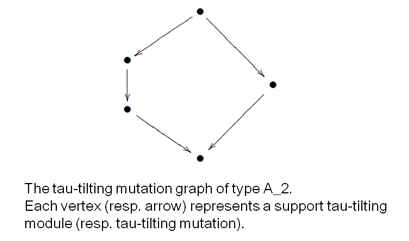
- Reconstruction of algebras from their support tau-tilting posets
- Combinatorial characterizations of support tau-tilting posets
Outline of research activitiesI study the tilting mutation, that is, an operation to get a new tilting module from given one. By using the tilting mutation, we can get many tilting modules. In association with tilting mutation, we can define partially ordered sets which are called (support tau-)tilting posets. My interest is in combinatorial properties of these posets.
- Desired cooperation
-
-
Faculty of Information Science and Engineering, Department of Information Science and Engineering
- Associate professor
- Wataru KOBAYASHI
- Research Field
Control, Rehabilitation, System Engineering, Fluid mechanics
- Keyword(s)
Fluid Power System, Rehabilitation, Life Support System, Green Drive Source
- Research theme
-
- Control of tap-water drive artificial muscles
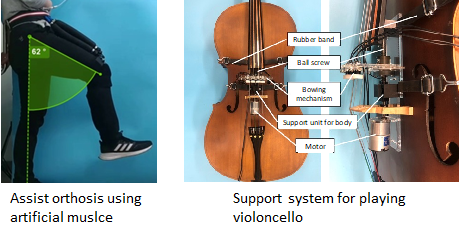
- Assist orthosis for under-water gait training
- Pure tap-water drive system for emergency drive source
- Support systems for musical instruments
Outline of research activities

Water hydraulic systems which use tap-water as working fluid are called aqua drive systems and they can realize novel green drive sources with 100% oil-free characteristics. In our laboratory, we study to realize a clean and safe system for rehabilitation, power assist, and life support. In addition, we have developed pure aqua drive systems, which can be driven without any power source, by controlling fluidic flow and have applied such systems to emergency drive sources and disaster prevention systems. We have also developed support systems to play musical instruments by only one hand.
- Desired cooperation
-
- Application of aqua drive systems for rehabilitation and life support systems
- Development of emergency drive source and disaster prevention systems using pure aqua drive systems
- Development of support systems for musical instruments
-
Faculty of Information Science and Engineering, Department of Information Science and Engineering
- Lecturer
- Jun TSUZURUGI
- Research Field
Statistical information mechanics.
- Keyword(s)
Image restoration, Statistical mechanics, Neuro science
- Research theme
-
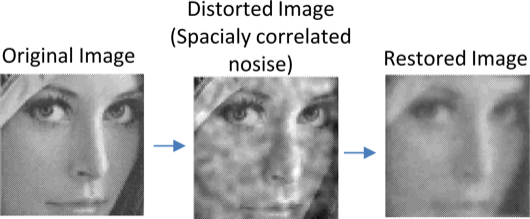
- Statistical Mechanics of the Bayesian Image Restoration under Spatially Correlated Noise.
Outline of research activitiesThe aim of this study is to investigate the use of the Bayesian inference and to restore noise-degraded images under conditions of spatially correlated noise. The generative statistical models used for the original image and the noise were assumed to obey multi-dimensional Gaussian distributions whose covariance matrices are translational invariant. This study derives an exact description to be used as the expectation for the restored image by the Fourier transformation and restored an image distorted by spatially correlated noise by using a spatially uncorrelated noise model.
- Desired cooperation
-
-
Faculty of Information Science and Engineering, Department of Information Science and Engineering
- Lecturer
- Masashi YOKOTA
- Research Field
Robotics, Control engineering, Mechatronics
- Keyword(s)
Mechatronics control device, Power assist device, MPU
- Research theme
-
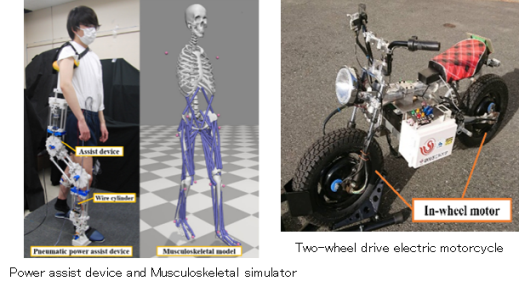
- Development of Non-Wearing Type Power Assist Device
- Development of Control System for Two-Wheel Drive Electric Motorcycle
- Development of Guidance System for Mobile Robots Using Ceiling Cameras
Outline of research activities
In this study, various mechatronics devices and control systems with pneumatic and electric actuators such as non-wearing type power assist devices, electric motorcycles, and mobile robots were developed based on MPU (embedded controller) and RTAI. The tested power assist device was attached a subject and the muscle burden was evaluated by using myoelectric sensors and a musculoskeletal simulator. In addition, in the study of electric motorcycles and mobile robots, these control systems were designed based on the analytical simulation. Through these studies, I’m going to submit papers and give presentations in domestic/international conferences.
- Desired cooperation
-
- Development and evaluation of power assist devices
- Development and evaluation of mechatronics control devices.
- Development and evaluation of control systems, etc.
-
Faculty of Information Science and Engineering, Department of Information Science and Engineering
- Lecturer
- Sachio KANNO
- Research Field
Numerical computation, Symbolic computation
- Keyword(s)
Numerical computation, Symbolic computation, Computer graphics
- Research theme
-
- Software development for hight precision computation
- Application of symbolic computation with LISP
- CG, MIDI
Outline of research activitiesWe develop multi-precision computational routines with automatic result verification.
These routines, tracing error bounds of each steps in computation, finally give an interval in which the exact result exists.
Also, we study on tonal music generating system using MIDI interface as an application of symbolic computation.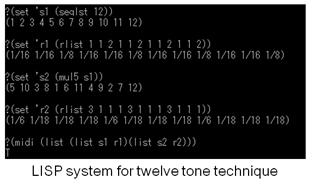
- Desired cooperation
-
Search by department
Search by SDGs