-
Organization for Research and Community Collaboration, Design and Manufacturing Center
- Lecturer
- Takashi Shinohara
- Research Field
Pneumatic control device, Processing technology
- Keyword(s)
Soft actuator, Soft sensor, Pipe inspection robot, Manufacturing, Burnishing
- Research theme
-
- Development of a soft actuator and a soft sensor
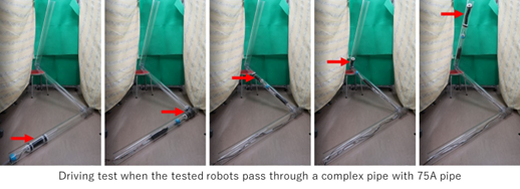
- Development of a pipie inspection robot using a pneumatic flexible actuator
- Development of a local structure control technology with the burnishing
Outline of research activities
We are developing soft actuators and soft sensors with flexibility and safety in life support devices and human frendly robot that act directly on humans. In addition, we are developing a pipe inspection robot that has a flexible structure by itself using a pneumatic actuator that can run on its own in complicated pipe and can be used in a wet narrow space. Then, in order to reduce the weight and labor of the peripheral equipment for driving the robot, we have devised a control valve with excellent cost performance and a new propulsion mechanism of the robot, and are considering making the inspection robot compact. Furthermore, we are developing local structure control technology by using burnishing as research on processing technology.
- Desired cooperation
-
- Development and application of a soft actuator and a soft sensors
- esearch on processing technology
Search by department
Search by SDGs