岡山理科大学 研究・社会連携部|研究支援・ご相談等、お気軽にお問い合わせください。
![]()
工学部・電気電子システム学科 教授 笠 展幸
工学部・電気電子システム学科 講師 麻原 寛之
理学部・基礎理学科 教授 森 嘉久
理学部・応用物理学科 准教授 石田 弘樹
工学部・電気電子システム学科 教授 河村 実生
工学部・電気電子システム学科 講師 荒井 伸太郎
①背景と経緯
地球温暖化防止のためのエコシステムとして、自動車の要素技術の省エネルギー化技術革新が急務となってい
ます。一方、近年は要素技術の優位性および実現可能性を示すには個々のデータではなくシステム総合したソリ
ューションとしての提案が重要になってきています。
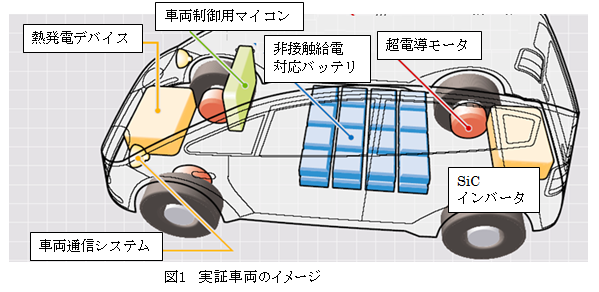
そこで本プロジェクトは、次世代自動車として電気モータを主動力とした電気自動車、ハイブリッド自動車お
よび燃料電池車のさらなるエコシステムの実現を目指す研究開発です。マイクロコンピュータを用いた電力およ
び車両制御技術をイノベーションハブとして、それぞれ特徴のある要素技術であるSiCインバータ・熱発電用半
導体・非接触給電・超電導モータ(発電機)・車両通信と組み合わせることで省エネルギーにかかわるイノベー
ションに寄与することになります。また、相互の関連や統合した技術やソリューションを次世代自動車として形
にすることが可能です。
②研究期間内の目標
1年目は、イノベーションハブ技術であるマイコンによる電力制御によって、個々の要素技術であるSiCインバ
ータ・熱発電用半導体・非接触給電・超電導モータ(発電機)・車両通信のシステム化を実現します。2年目は
システム化された個々の要素技術を統合して図1のような次世代自動車の実証車両を構築します。
③特色および独創性
本研究開発の特色は、独創性のある下記5個の要素技術を1年目でシステム化して、2年目に統合した実証車を
構築することです。実証車は次世代自動車技術としての広告塔であり、量産実現を示すソリューションとしての
提案が可能になります。イノベーションハブ技術であるマイコンによる電力制御は、すでに住宅機器メーカーの
量産品として採用の実績や岡山県の次世代電気自動車のMCU(モータ制御ユニット)として採用されています。
1) SiCインバータ
SiCパワーモジュールを用いたインバータの小型化を行います。SiCパワーモジュールについては、産業クラス
ター形成を支援する中国経済産業局 「次世代パワーデバイス研究会」の協力のもと三菱電機株式会社にサン
プルを提供していただくことが可能です。SiCは従来のSiベースの絶縁ゲートバイポーラトランジスタ(IGBT)
にくらべて、電力損失が少ないためスイッチング周波数の向上によりコンデンサの小型化も相まって同容量の
インバータで数分の1の体積へ小型化できます。動作検証では、マイコンによる電力制御によってインバータ
を接続したモータの駆動テストで 回転数に対するトルクを計測します。
2) 熱発電用半導体
環境負荷へ配慮した熱電デバイスであるシリサイド熱電デバイス(マグネシウムシリサイド:Mg2Si、マンガン
シリサイド:MnSix)により構成されたデバイスの研究開発その実装・実証実験を行います。実証実験では、マ
イコンによる電力制御によってDC/DCコンバータを接続した熱電デバイスの出力電力を計測します。
3) 非接触給電
家庭用電源(60Hz)をそのまま電力伝送することのできる、非接触給電システムの研究開発を行います。
家庭用電源をそのまま伝送することで、従来方式と比較してシステム全体の低価格化と効率化が図れます。
本研究ではシステムの設計手法を確立し、実車に搭載した動作検証により実用性の評価を行います。
4) 超電導モータ(発電機)
超伝導モータの課題を克服する新しい方式の原理確認と実用性の検証を行います。動作検証は、マイコン制御
によるインバータを接続した超電導モータの駆動テストで、従来の超伝導モーターでは実現できなかった高速
回転域でのトルク特性を計測し超伝導特有の損失の解明とその解決方法について研究します。
5) 車両通信システム
自動運転に寄与する方式の一つとして、LED光と車載カメラによる自動運転支援システムを実車に実装します。
動作検証では、支援システムからのLED光を用いて送信された制御信号を車載カメラで検知・受信し、車両のコ
ントロールを行います。