-
情報理工学部 情報理工学科
- 准教授
栁 貴 久 男
- 研究分野
計算機統計学
- キーワード
統計解析、データサイエンス
- 研 究
テーマ -
- 統計解析ソフトウエアの開発
- 統計教育
研究活動の概要様々な形で存在するデータから統計解析を行っています。「ビックデータ」から何か新しい見地を発見することなども行っています。また、そのための環境・ソフトウエアの開発について研究しています。
その他、一般の方々も含んだ形の統計教育の方法についても取り組んでいます。- 希望する
連携内容 -
- 統計解析
- データ処理
-
情報理工学部 情報理工学科
- 講師
菅 野 幸 夫
- 研究分野
数値計算、記号計算
- キーワード
数値計算、記号計算、コンピュータグラフィックス
- 研 究
テーマ -
- 多倍長高精度計算ルーチンの開発
- LISPによる記号的計算の応用
- CG、MIDI関連
研究活動の概要多倍長計算・計算精度保障付き演算ルーチン、記号計算のためのLISPライクなシステムの開発を行っています。
計算精度保障付き演算ルーチンでは、計算の過程で生じる誤差の評価を自動的に行い、最終的に厳密な値の存在する区間を任意精度で求めることが出来ます。
また、記号計算の応用としてMIDIインターフェースを使い作曲システムの研究を行っています。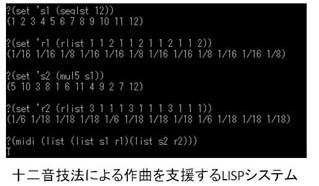
- 希望する
連携内容 -
- 高い計算精度の要求される技術計算
- 記号的演算の求められるシステム
- MIDI制御システム
-
情報理工学部 情報理工学科
- 講師
綴 木 馴
- 研究分野
情報統計物理学、脳数理科学
- キーワード
モデル評価解析、画像処理、神経回路
- 研 究
テーマ -
- ガウスモデルで与えられる模型の統計力学的解析
- 画像処理モデルの構築とモデルの解析
- 自己組織化マップの応用
研究活動の概要研究は主に、データ修復モデルの性能評価解析をしている。例えば、さまざまなノイズで劣化した画像を修復する際にどれだけの修復が出来るか?と言う様な問題に取り組んでいる。その他にも新しいモデルの考案もしている。
図は、ガウス過程の修復の様子で、実線が真のデータで、菱形の点がノイズにより劣化したデータであり、破線は劣化したデータから真のデータを推定した曲線である。この様なモデルの性能評価を解析的に解いている。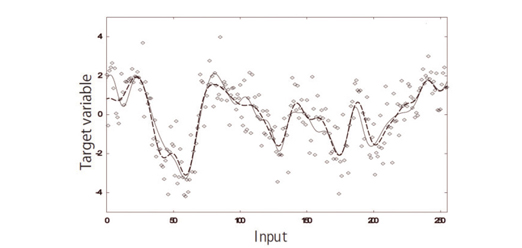
- 希望する
連携内容 -
- 脳の数理モデルの解析または数値解析
-
情報理工学部 情報理工学科
- 講師
横 田 雅 司
- 研究分野
ロボット工学、制御工学、メカトロニクス
- キーワード
メカトロニクス制御機器、パワーアシスト装置、MPU
- 研 究
テーマ -
- 免荷型空気式パワーアシスト装置の開発
- 前後輪二輪駆動電動バイクの制御に関する研究
- 天井カメラを用いた移動ロボットの誘導システムの開発 など
研究活動の概要
MPU (組み込み系)やRTAIを用いて、免荷型パワーアシスト装置や電動バイク、移動ロボット(AGV・AMR)などの空気圧・電動アクチュエータを搭載したメカトロニクス機器や制御システムの研究・開発を行っている。免荷型パワーアシスト装置の研究は、実機を製作し、筋電センサや筋骨格シミュレータを用いて装着者の身体負担を調べ、支援効果を検証している。また、前後輪二輪駆動電動バイクのトラクション制御システムや移動ロボットの誘導システムの研究は、シミュレーションによる解析や制御系設計を行い、実機を用いた検証も行っている。研究を通して、論文投稿や国内・国際会議への参加、特許申請、共同研究など積極的に行う。

- 希望する
連携内容 -
- パワーアシスト装置の開発・評価
- メカトロニクス制御機器の開発・評価
- 制御システムの開発・評価 など
SDGsで探す