-
研究・社会連携機構 研究・社会連携センター
- 教授
佐 藤 洋 一 郎
- 研究分野
回路設計工学、画像工学
- キーワード
非同期システム、メタスタビリティ、FPGA、特徴抽出
- 研 究
テーマ -
- 道路紋様に着目した自動車の車速推定の高性能化
- フリップフロップのメタスタビリティを用いた乱数生成
- 色呈示と情動との関係について
研究活動の概要

自動車内で提示される車速は車輪の回転から求めるので、タイヤの摩耗などにより誤差が生じています。GPS や地図情報による手法でも、環境や経年変化の影響を受けやすいという問題があります。そこで、道路面の紋様(以下、道路紋様)に着目して、路面画像上の特徴点マッチングによる位置推定手法を開発し、自動車の車速測定に応用しました。
【特徴点による移動距離推定】
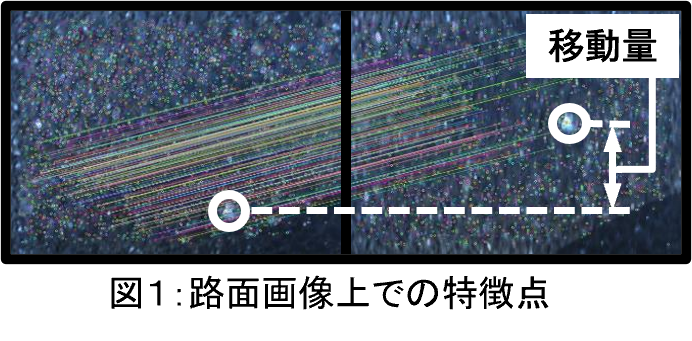
(1)路面に向けて自動車に設置したカメラで路面を撮影(図1左が第i,右が第i+1フレーム)。
(2)同じ特徴量を持つ左右の画像上の特徴点のペア(図1の色付き直線の始点と終点)。
(3)(2)の特徴点ペア毎に,幾何補正パラメータを求め,ヒストグラムを作成。
(4)ピーク値に対応するペアの移動量算出。【車速の計算】
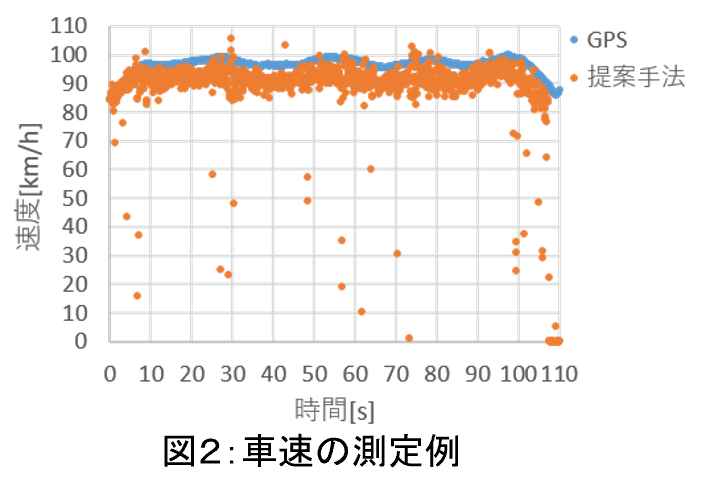
カメラ(GOPro HERO10,120fps)を自動車下に設置し、移動距離/frame期間として車速を算出(図2)。
GPSに対する相対誤差は-5%程度と、高精度。
- 希望する
連携内容 -
- 各種工業製品の寸法自動計測
- 製造現場などでの人物の抽出と追跡
- FPGAボードへの画像処理などの実装
-
研究・社会連携機構 研究・社会連携センター
- 特担教授
辻 維 周
- 研究分野
道路生態学
- キーワード
ロードキル、レールキル、獣害対策
- 研 究
テーマ -
- 低周波・高周波を使って野生動物と人間との距離を保つ研究
- ロードキル対策
- バードストライク対策 など
研究活動の概要



T.Mworksが開発した高周波発生装置の鹿ソニックⓇ、バードソニックⓇを使って、獣害対策はもちろんのこと、バードストライク、ロードキル、レールキルを抑止することで、動物と人間双方の関係をより本来の姿に戻す研究を行っています。この装置はタイマーを使って一定時間稼働させ、シカ、鳥などを忌避するために使用しており、大きな実績を上げています。高周波発射装置は車載型、設置型があり、空港では関西3空港をはじめとした9空港で採用され、稼働中です。またポータブルタイプのハイパー鹿ソニックを現在開発中であり、林業関係者や登山関係者から期待されています。
なおペットや人間などに対する影響はありません。

- 希望する
連携内容 -
- クマの冬眠による音慣れリセットの有無
- 動物生態学 など
SDGsで探す